
My poor little Nabaztag rabbit is feeling the heavy weight of years. Modern WiFi means it is having trouble connecting to newer access points so I need another solution. With that in mind I decided to have a go at replacing the guts with something a little more modern and the ESP32 sounded perfect. I’ve …
Category Archives: Hardware
Roomba running on a Makita 18v cordless drill battery
I just got myself a nice new Makita 18v drill. It’s really nice 🙂 On thing about my battery operated tools I’ve noticed is that I tend to have one battery in the device and another charging. Since I don’t used them very often they batteries tend to degrade after a while, so I was …
Continue reading “Roomba running on a Makita 18v cordless drill battery”
Data rescue
As with most “computer” guys (and gals), I often get asked to look at computer problems. This latest one has been interesting. A friend overseas had their USB hard disk (WD My Passport Ultra) fail so she shipped it to me to take a look at. When I plugged it into a Mac I got …
JTAG is fun :)
It’s amazing what you can find inside the RAM on embedded devices using a JTAG! I’m currently dumping the RAM image of an energy usage monitor. So far I’ve seen OpenVPN keys and a few other interesting files still in memory. With any luck I’ll get a copy of /etc/passwd 😉
I’ve been a bit quiet of late
It’s been quite a while since my last post. I’ve been really busy with my work and haven’t had much time for my many hobbies of late. Over the last weekend I managed to dig out my 3D printer that I’d been working on for a while and finally managed to get it going. There …
More DroboPro FS fun
I’ve been playing around with my old DroboPro and in the process managed to frag the uBoot config rendering the unit basically useless as the vxWorks side didn’t boot the special disk applications required for correction function. Â Fortunately I have another Drobo, in this case a Drobo FS. Â I was able to disassemble that (I …
Drobo Pro/FS
After working through it a bit more it appears that the problem is actually in the Drobo Dashboard. Â For some reason it is refusing to show the “Drobo ProFS”. Â I loaded up the 1.8.4 version of the Drobo Dashboard and it sees the unit just fine but doesn’t allow much to be configured. Â Maybe I …
Breathing new life into my Drobo Pro
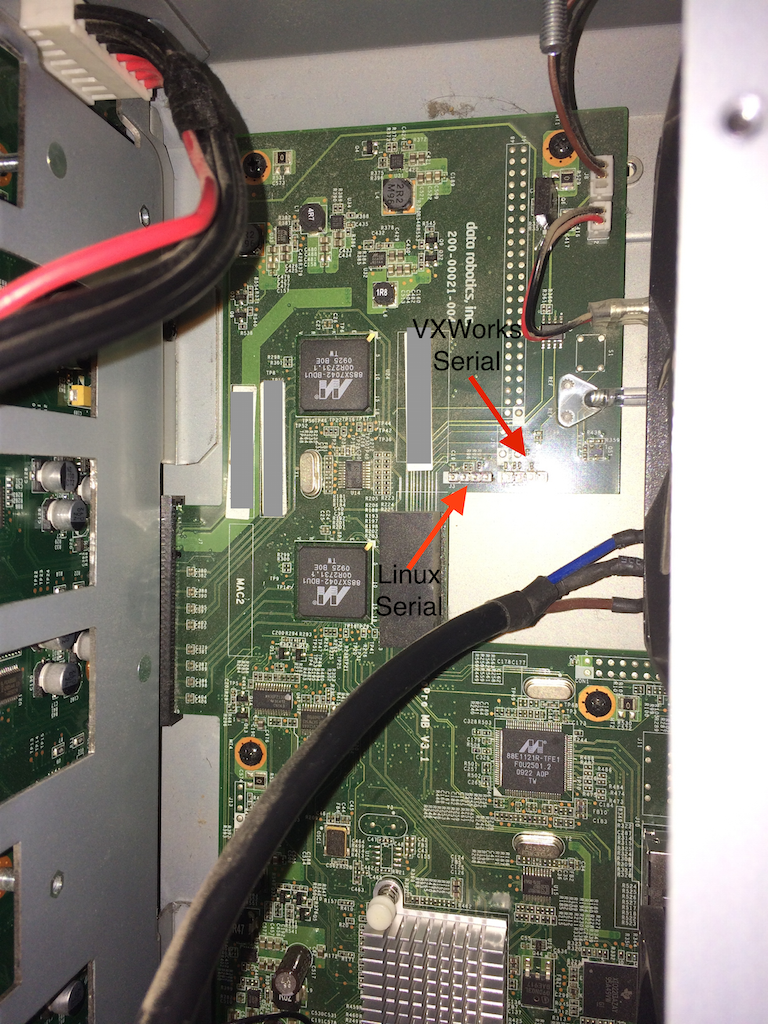
I recently saw a post somewhere that showed the internals of one of the newer high end Drobo machines. Â It appeared to use the same motherboard as the Drobo Pro I have sitting here on my desk gathering dust so I decided to take another look at what I could do with the thing. Â I …
I finished another PIC32 proto board
It is a lot smaller that my previous one and fits better into the breadboard 🙂 I think I have also figured out why many of my PIC32 projects were crashing randomly. Â It appears I was setting the oscillator up incorrectly which was causing the lower spec PIC32MX2xx to try to run at the same …
PIC32 Prototyping
I’ve been thinking for a while that prototyping stuff with the DIP PIC32 parts should be easier, so I built something over the weekend to make that a reality. Instead of this: I can now start with this: It is just the bare minimum to get a DIP PIC32 part up and running with USB …