
I’ve been playing around with my old DroboPro and in the process managed to frag the uBoot config rendering the unit basically useless as the vxWorks side didn’t boot the special disk applications required for correction function. Â Fortunately I have another Drobo, in this case a Drobo FS. Â I was able to disassemble that (I …
Tag Archives: hacking
Drobo Pro/FS
After working through it a bit more it appears that the problem is actually in the Drobo Dashboard. Â For some reason it is refusing to show the “Drobo ProFS”. Â I loaded up the 1.8.4 version of the Drobo Dashboard and it sees the unit just fine but doesn’t allow much to be configured. Â Maybe I …
Breathing new life into my Drobo Pro
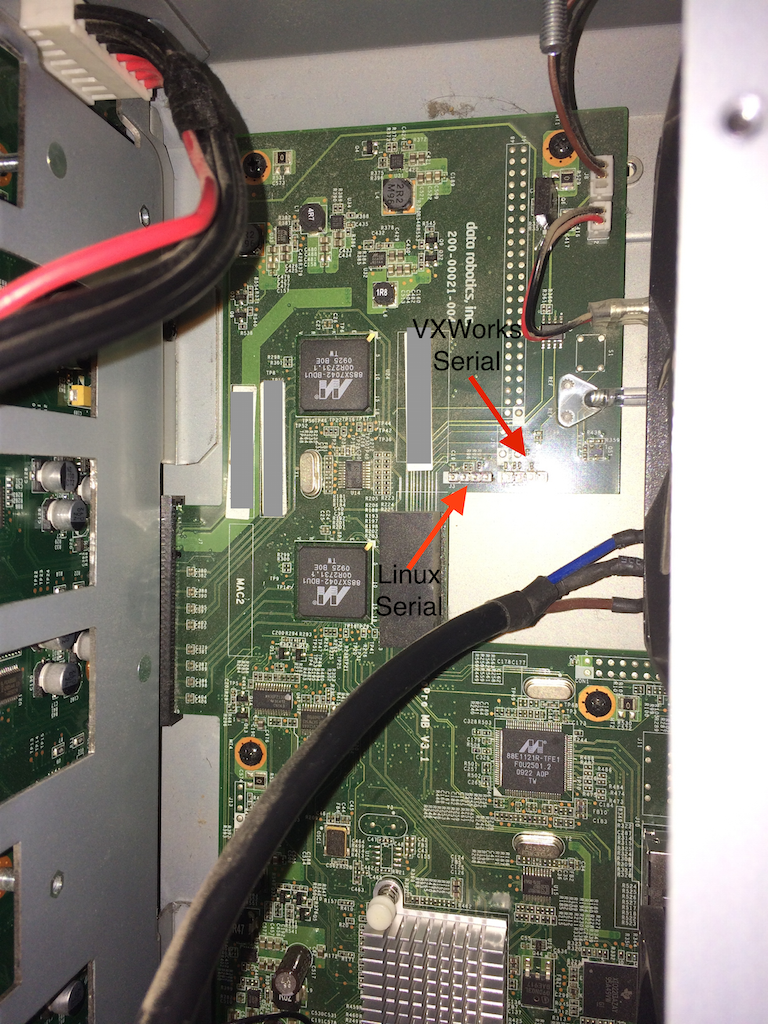
I recently saw a post somewhere that showed the internals of one of the newer high end Drobo machines. Â It appeared to use the same motherboard as the Drobo Pro I have sitting here on my desk gathering dust so I decided to take another look at what I could do with the thing. Â I …